飞塔是由飞控和四合一电调叠在一起组成,
而AIO(All in one)是将四合一电调集成在飞控上。
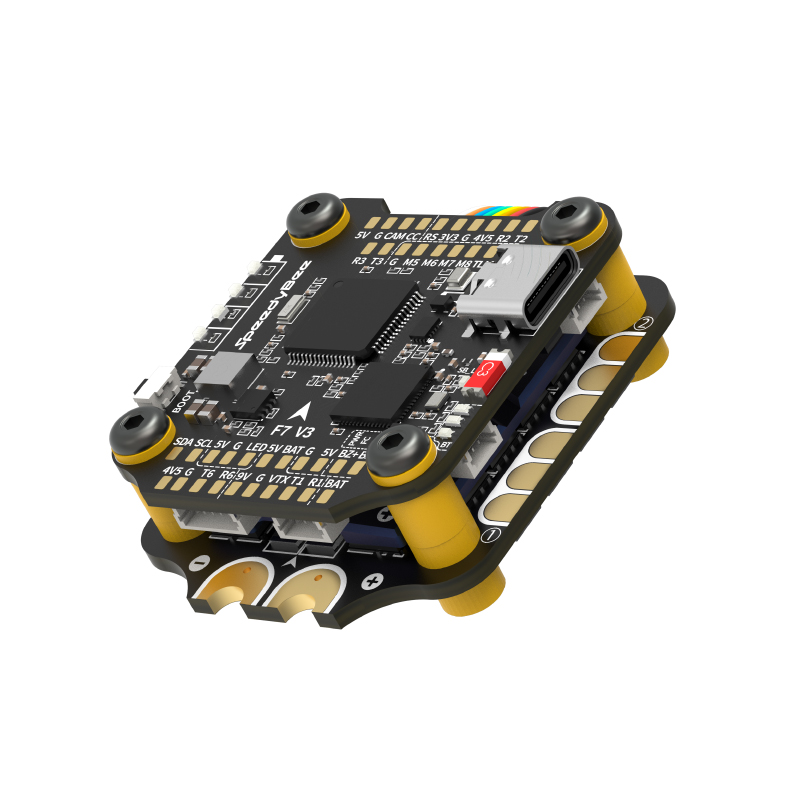
图中为快蜂 F7 V3 飞塔
飞控
全称飞行控制器,是控制穿越机的核心,主板上集成了一个主控芯片以及数个传感器,通过处理传感器得到的数据,来控制穿越机飞行。
飞控的孔位尺寸一般为
20×20mm,25.5×25.5mm,30.5×30.5mm,根据机架来选择对应孔位的飞控/电调/AIO。飞控上会板载一些传感器,常有
主控(MCU),
主控(MCU)

主控负责处理各种传感器的数据和控制信号。
穿越机的主控可以刷入许多固件,如Betaflight,INAV,ArduPilot等固件。大多数情况穿越机会使用Betaflight固件。
Betaflight偏运动,INAV偏商务。
多数飞控会采用意法半导体的STM32单片机,如F系列,H系列等。
性能表现H7>F7>F4>F3>F1,目前的穿越机基本不会用F4之前的主控。
比较常用的型号有
STM32F405,STM32F722,STM32H743等。
陀螺仪(IMU)

飞控上的陀螺仪一般指惯性测量单元,集成三轴加速度计和三轴陀螺仪,用于获得穿越机当前的姿态和加速度数据。
部分飞控会带有双IMU,数据更加精准,但需要更加强大的主控处理数据。
现在常用的IMU一般使用
ICM42688P,比老牌IMUMPU6000性能更强,价格更低。
气压计(BARO)*(非必须)
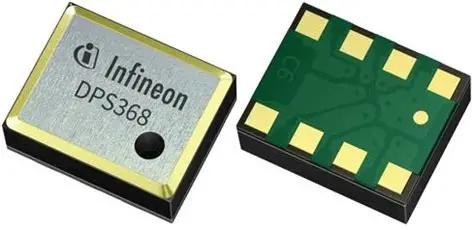
测量大气压,用于估算当前的高度,部分穿越机固件会用来辅助定高/GPS返航。
部分飞控会带有双BARO,数据更加精准,但需要更加强大的主控处理数据。
现在常用的BARO有
DPS368,ICP20100等。
接口/焊盘
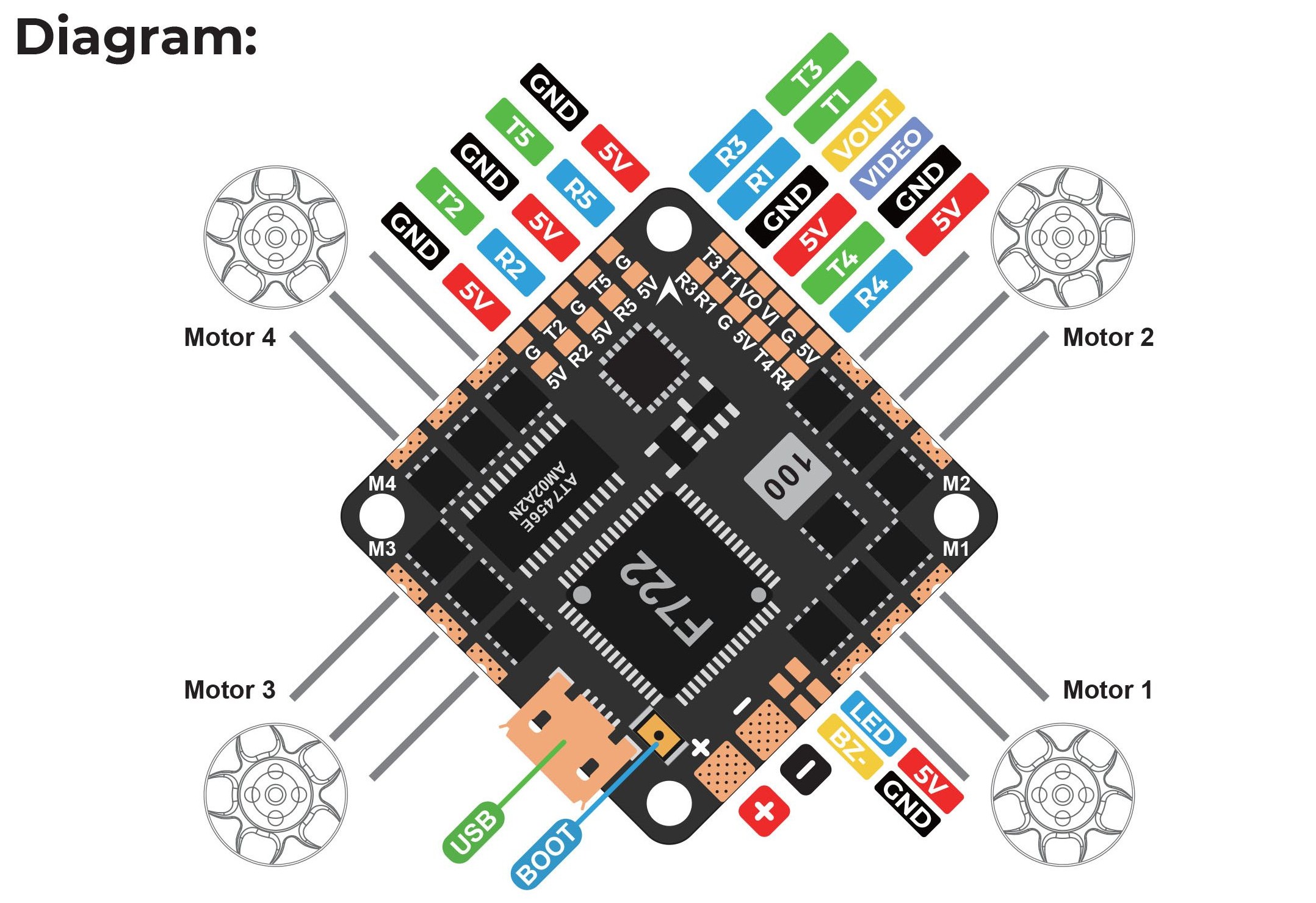
用于接入外部传感器/设备,如GPS,接收机,摄像头,图传,电调 等
焊盘或接口均可连接,按照指定的UART端口,在地面站选择功能。如接收机,可以接在
T2R2,5V,GND,在地面站打开端口打开对应的数字串行接收机。外设端口也可以选择插入SH1.0的卧贴针座,注意线序,部分电调和飞控连接会采用这种方法,现在Betaflight已经提出了规范
Betaflight 连接器标准 |测试飞行,请督促厂商规范标准
电调
电调全称为电子调速器 (ESC) 是一种用于控制和调节电动机转速的电子电路。它还可提供电动机的反转和动态制动功能。
当前的穿越机多会使用四合一电调,可以与飞控叠加在螺柱上组成飞塔,分体电调目前较为少见,部分电调会集成在飞控上,组成AIO。
在选择电调方面,选择合适的电机搭配可以发挥完全的性能。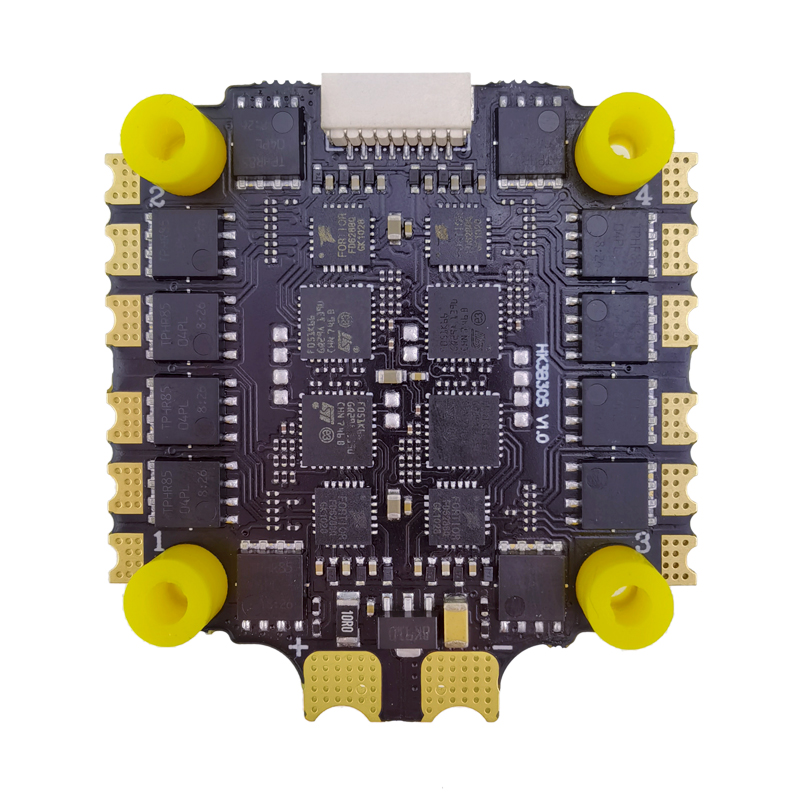

图中为海科32位四合一电调,和好盈分体电调
电调分为8位和32位,区别在于单词可以处理的数据位宽,32位电调单次可以处理更多的信息,可以做到更高的刷新率。
电调一般使用电调地面站进行调参 ESC Configurator ,调参前一定要拆卸桨叶再上电!!!
在刷入BlueJay固件的电调,32位电调可以刷入比8位电调更长的自检音效 。