
本文介绍模拟以及数字两大类图传的区别
图传是无线图像传输,实时传输视频流到指定的设备
分类
主要分为两大类:模拟图传和数字图传。
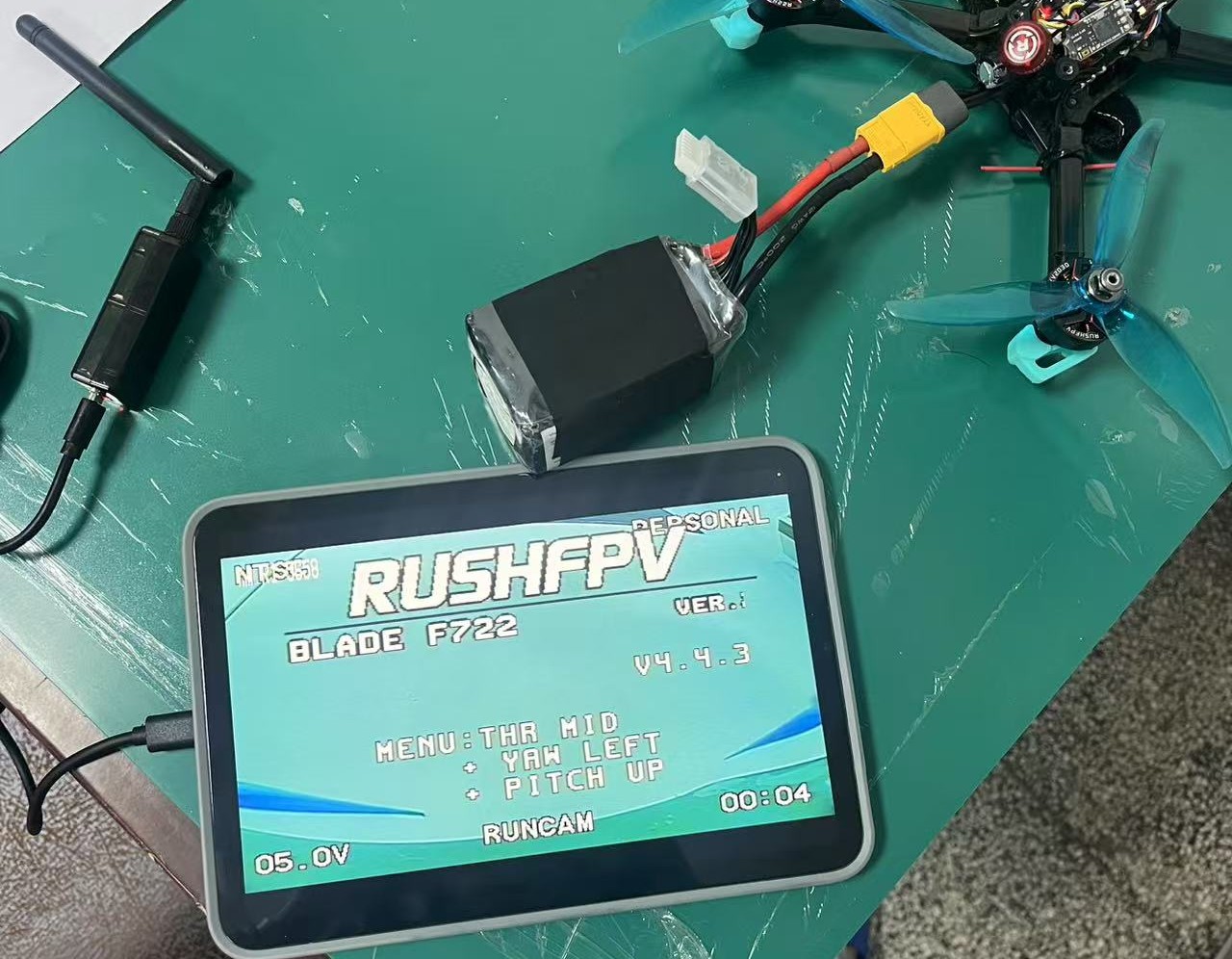
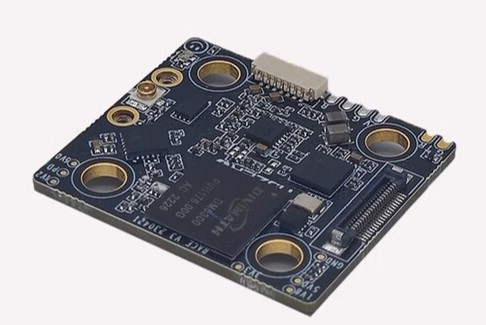
模拟图传

图中为 快蜂TX1600
模拟图传的原理是用连续波动的电信号直接承载图像信息,通过调制载波的幅度、频率或相位参数,使每个像素点的亮度和色彩实时对应无线信号的波形变化。
模拟图传可以被任何模拟图传接收设备接收到信号。
模拟图传大多没有过热降低功耗的功能,一般借助外置风扇或是飞行中撞风来进行散热。
所以没有散热的模拟图传,长时间上电不飞,会导致功放芯片(PA)烧毁,呈现为接收的画面一片黑,而不是像未接入摄像头而显示黑背景+OSD,可以通过接收的画面判断问题。
别问我为什么知道,我已经烧了3个图传了(哭模拟图传的厂家相比数字图传更多,因为有很多开源的方案。
图传表
图传表为模拟图传特有的,将频率量化成
频段和频道,如A1为5865MHz
穿越机上模拟图传用的最多频段是
5.8GHz,各家图传的支持的频段不一定一样,可以参考一下 VTX Tables 或是向客服去要,图传表可以通过地面站刷入图传。
在地面站 -图传(VTX)-从文件加载刷入图传表。图传表一般为一个
JSON格式的文件,里面有4个字典:description,version,vtx_table以及powerlevels_list。description是这个文件的描述,不用管。version是这个图传表的版本号,不用管。vtx_table里面存储了频段,频段中存储着各个频道。powerlevels_list中存储着功率表,提供几个功率(毫瓦)。"description": "Betaflight VTX Config file", "version": "1.0", "vtx_table": { "bands_list": [ { "name": "A ", "letter": " ", "is_factory_band": true, "frequencies": [ 5865, 5845, 5825, 5805, 5785, 5765, 5745, 5725 ] } }, "powerlevels_list": [ { "value": 0, "label": "0 " }, { "value": 1, "label": "0.8" }, { "value": 2, "label": "1.6" }, { "value": 3, "label": "2.5" } ]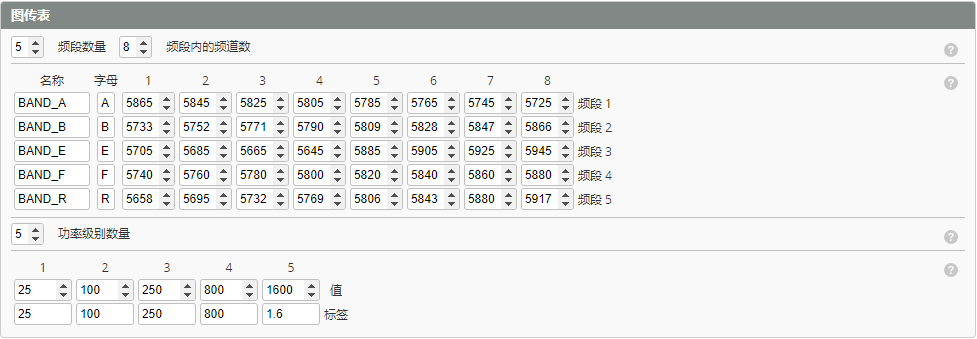
图传接收
模拟图传的接收方式众多,可以由如 鹰眼小飞手,FPV眼镜,FPV眼罩,模拟图传接收机等接收。

模拟图传的眼镜一般较为昂贵,因为它是由两块小OLED屏幕和透镜组成,同时对于接收的画面用到了一些算法处理,使得到的画面质量相比眼罩更好,所以就算性价比产品Skyzone 04O也不便宜。

所以很多入门玩家会选择使用FPV眼罩,这类产品里面是一整块的LCD屏幕,虽然画面不会被处理成眼镜那样好,同时信号普遍接收较差,但通常这类产品仅需几百元即可入手,对于新手入门较为友好。

一些玩固定翼的航模佬,或是作为观众去看画面,对于画面和延迟没有太高要求,也会使用一种图传接收机,输出信号到手机上,延迟大概在80-160ms左右

上图为Skydroid云卓UVC接收机,可以从USB/Type-C接口输出视频信号到任意设备,原理是伪装成摄像头设备。
上图的实现方式是用SLONWAKE的图传接收,插到iPad,用软件USB摄像头Pro呈现画面
一些航模佬也会另辟蹊径,用数字图传的眼镜去接收模拟图传,通过外挂一个模拟图传接收机

上图的图传接收机一般用于外挂在一些眼镜上,如肥鲨。但也可以通过购买转接座,转出一个AV线,可以接入到支持AV in 的任意数字图传眼镜上,如大疆FPV2。
YangFPV制作过有关视频:https://www.bilibili.com/video/BV1tC4y1Z7em/
数字图传

图中为 大疆O4Pro
数字图传的原理是先将图像信息采样量化为离散的数字数据,经过压缩和编码后,形成离散的数字信号流。通过调制载波,将这些代表图像内容的数据包搭载在无线信号上传输。接收端解码数据流后,才还原成对应的像素点亮度和色彩信息。
所以在原理上,数字图传相比模拟图传的画面更好。
数字图传多为闭源方案,且眼镜/眼罩不能互相通用。如大疆,蜗牛。HDZero有些另类,下面会说到。
数字图传的接收,一般都是点到点,图传发射信号,接收设备接收信号。
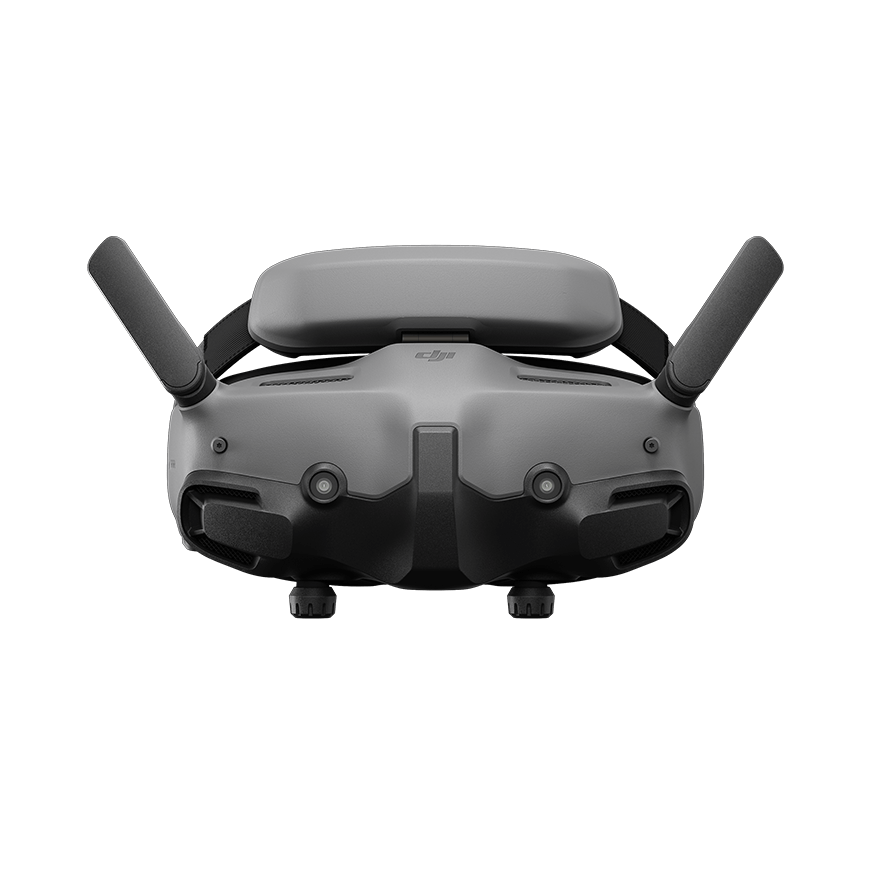
图中为大疆G3眼镜
传统数字图传及接收
这里一般指大疆以及蜗牛图传,使用FPV眼镜/眼罩接收信号。
这些传统的数字图传会用HEVC一次性编码多帧,如果遇到信号弱,甚至丢失信号,它会像网络的TCP协议一样,要求图传重新发送,如果收不到,那这一帧画面则会卡住,直到接收到重发或新发画面为止。
自家的图传也会有兼容问题,如大疆眼镜G3支持自家的O3,O4,之前的天空端不再支持。
而蜗牛caddx出过一个阿凡达接收机,可以接收画面并通过HDMI输出到任意设备,而部分模拟图传眼镜,可以通过外挂这个设备接收蜗牛图传的信号。

HDZero
HDZero是近几年出的一种全新的数字图传,拥有相比模拟图传的画面更好的同时,做到延迟低,一般常用于竞速。
HDZero的画面并不如大部分的数字图传。
HDZero将每一帧的画面拆分为多个簇,分别发送到眼镜中。同时带有一个校验信息,若该簇的校验不通过,或没有接收到,HDZero则会暴力地丢掉这个簇,将这一块的画面显示为雪花或用临近的簇进行填补,以达到低延迟的目的。
HDZero的最高优先始终是传输下一帧画面。
文案来源:破风小课堂

上图为 HDZero Goggle V2版,现在支持了接收模拟图传。
OpenIPC
这是一个开源的方案,通过网卡接收图传画面,成本极低。
延迟相对高一些,大约100ms,但如果用在固定翼或远航机上很不错。
GitHub: OpenIPC狼天科技RunCam已经做出一套成熟的方案。CNC铝壳+风扇价格能做到500以下。

闲鱼有些猛人做到了天空端图传+摄像头+地面端网卡80元包邮,价格极低。
