本教程以Betaflight固件的多旋翼无人机举例
如果上电调参,你的图传没有散热风扇,请拔掉图传,或是用暴力风扇给图传散热,防止图传PA烧掉!!!
上电调参一定要拆掉桨叶!!!
过程
下载/打开地面站(Betaflight Web)
将无人机连接到电脑
APP端会直接识别,网页端若无识别,需要在右上角点击I can't find my USB device ,在弹出的串行端口选择你的无人机。
在
设置界面,将机尾对着自己,在桌面放平,点击重置Z轴,移动无人机,检查六个轴的偏航,横滚和俯仰是否正常。
若机头方向不对,在配置界面重新调整机头位置。若在地面站轴始终无法正确显示,则检查飞控板陀螺仪上方是否有线缆经过。如果有,请重新布线,不要让线缆经过陀螺仪。如果始终无法解决,则大概率陀螺仪损坏。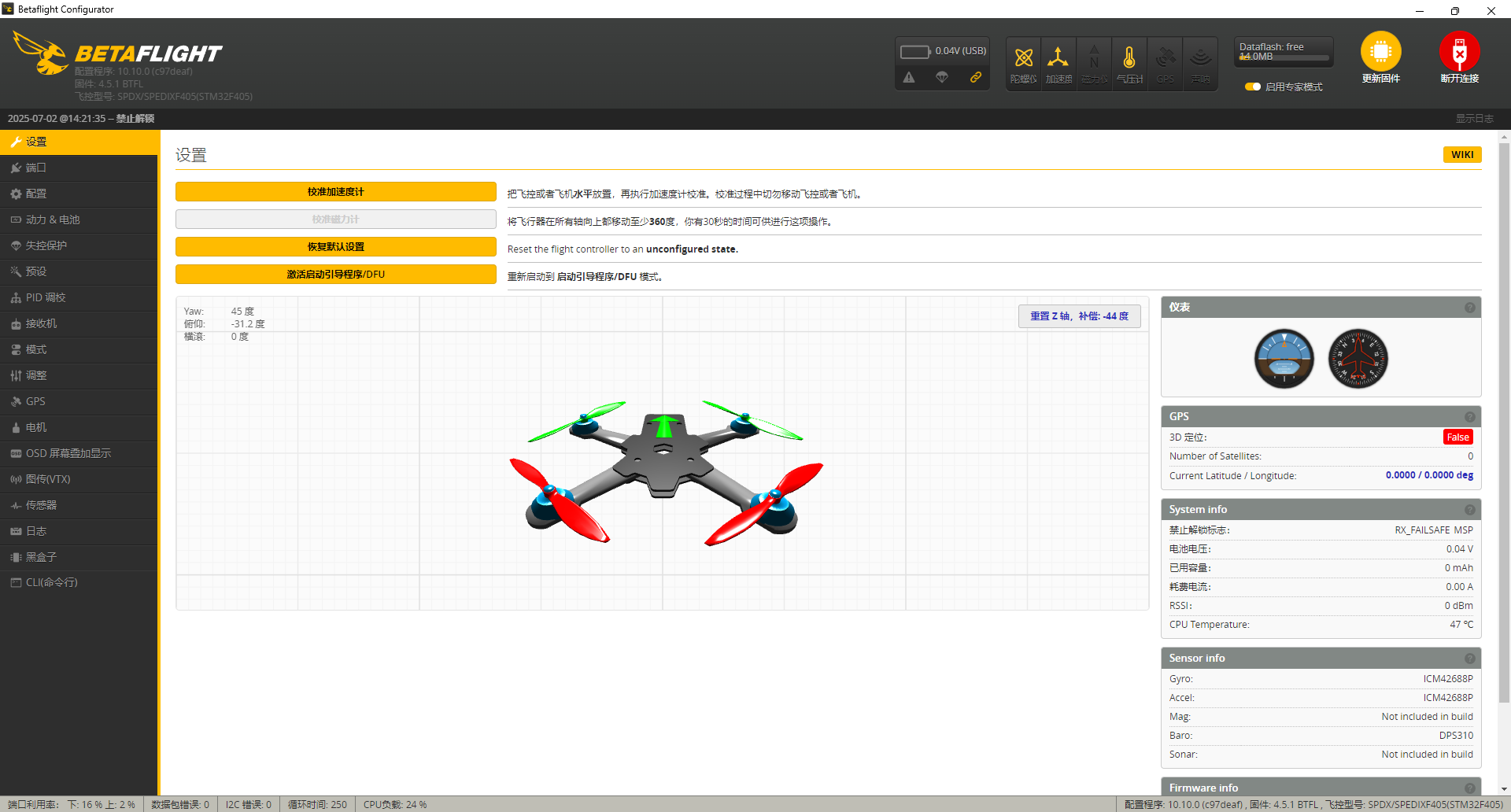
在
端口页面,确保接收机的UART端口已经打开接收机,图传等外设对应的端口,用遥控器对频接收机。
在
接收机页面确保各通道正常。遥控打杆,查看示意模型的是否正确。
根据接收机和遥控选择对应的协议,如ELRS接收机和ELRS高频头的遥控,接收机模式选择 串行接收机(with UART) 串行接收机选择 CRSF ,点击右下角 保存 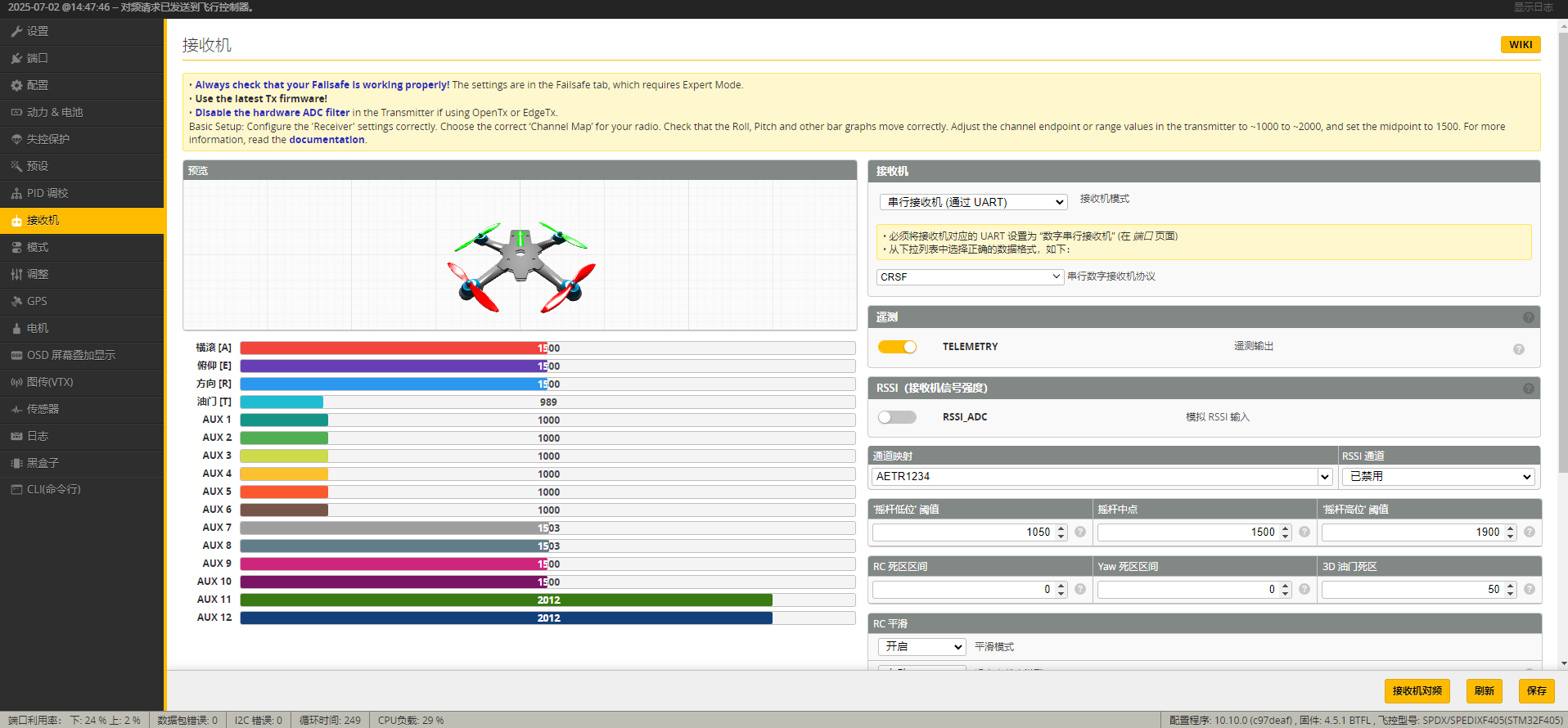
进入
模式设置ARM解锁通道
点击 添加范围 后,遥控打对应的通道,地面站会自动识别,如果打错了,点击下拉菜单 AUX ? 重新调回 自动 重复操作。
下方的小黄光标指示当前通道的遥控发射的值,上方划定的范围就是在此范围内激活。
如下图,遥控 AUX1 设置为解锁,掰下开关即起桨。
小提示: 请划定范围不要过小,可以参考下图,因为遥控信号会波动,例如 ARM 波动一些,超出区域外,飞机在空中就会锁桨,同一通道划定的范围不要重叠,否则部分功能会冲突。如果你想要此通道同时激活几个功能,你可以这么设置。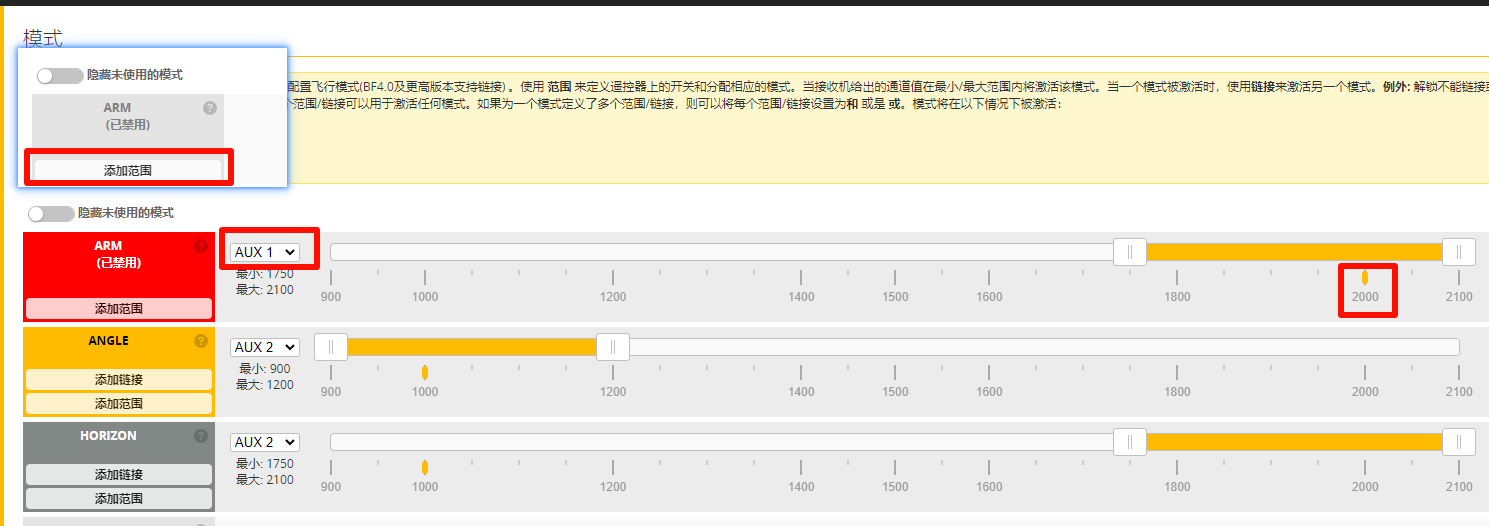
介绍几个常用的英文对应的中文
ARM :解锁/起桨/手动模式
ANGEL :自稳模式
HORIZON :半自稳模式
HEADFREE :无头模式
GPS RESCURE :GPS返航
BEEPER :哔哔响
FLIP OVER AFTER CRASH :反乌龟
调整
电机
四轴穿越机的混控类型选择QUAD X,电调功能可以打开的类型请咨询对应的客服。
第一次调试请先调整电机顺序,然后设置电机转向,电机转向选择向导,按照图示设置。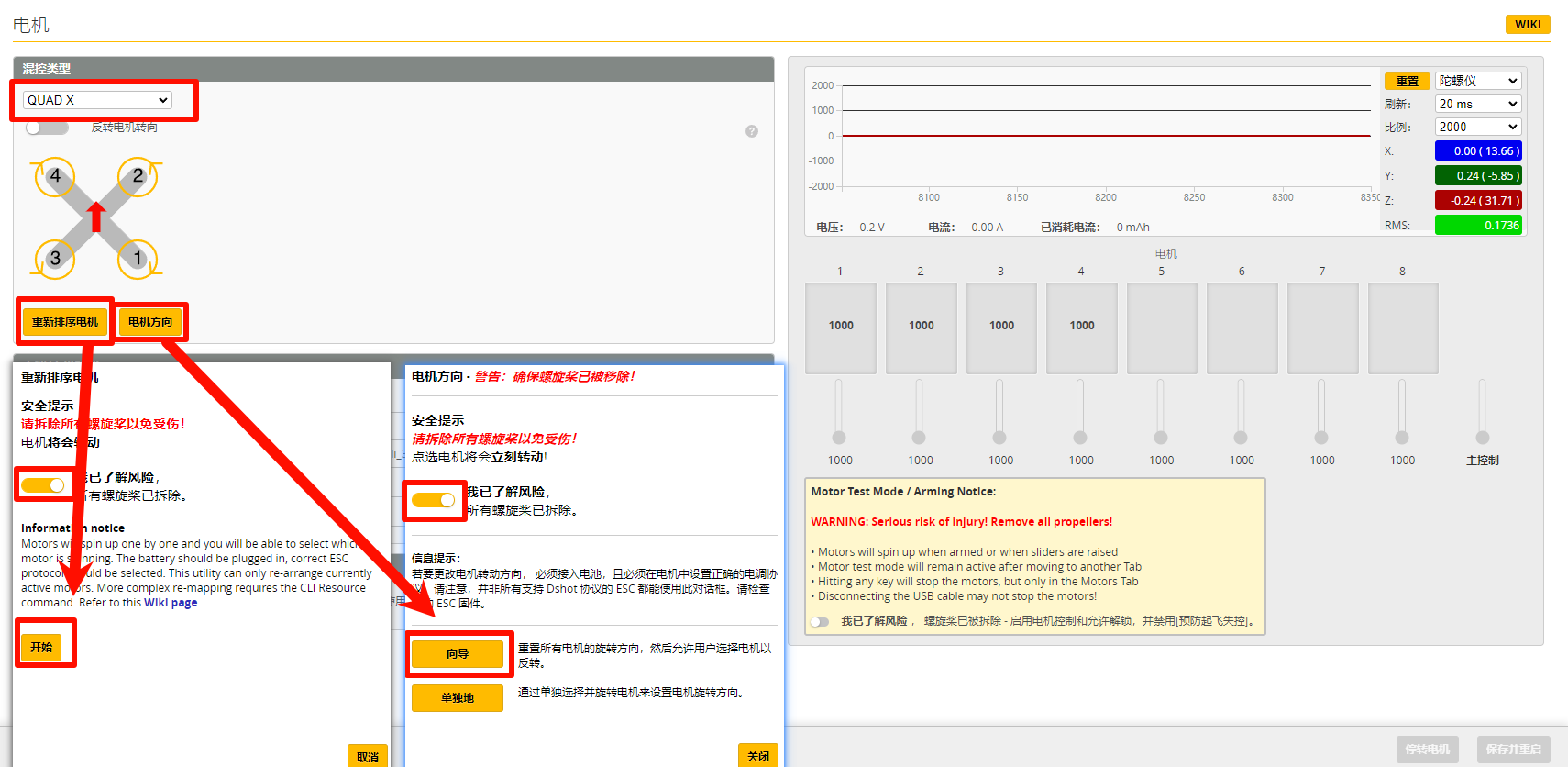
装上桨叶,试飞吧!