详细解析ELRS V3 脚本在Edge TX系统的使用,调整。
ELRS脚本下载:Releases · ExpressLRS/ExpressLRS
ELRS英文网页 ExpressLRS Lua Script
导入脚本
将遥控接入数据线,选择
USB Storage(SD)后,在电脑打开新出来的盘符,进入盘符:\SCRIPTS\TOOLS,将elrsV3.lua拖入文件夹,然后就可以在遥控的System中第一页看到ELRS脚本 ,名称为ExpressLRS。按[ENT]键进入脚本。脚本页面主页面短按
RTN键为刷新脚本,长按RTN键为退出。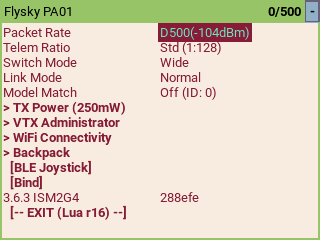
功能详解
Packet Rate
数据包发送频率。每秒钟发送的数据包频率。
50Hz,150Hz,250Hz……(后缀Hz)普通模式
如 50Hz ,每秒向接收机发送50次数据包,数字越大,每秒发送的次数越多。
LoRa技术。稳定,但稍慢,最常用,信号覆盖最广的模式。F500,F1000(前缀为F,无后缀)极速模式
纯FLRC技术,传输延迟最低,反应更加迅速,代价是传输距离不如普通模式。
D250,D500(前缀为D,无后缀)冗余模式
冗余传输 FLRC技术。D分别代表Déjà Vu(逮虾户),传输延迟优于普通模式,但比极速模式差一些。传输距离与极速模式相近。但对传输数据包做了冗余,稳定性优于极速模式。100Hz Full,333Hz Full(无前缀,后缀Hz + Full)全分辨率模式
基于LoRa技术,10位全分辨率模式,数据更加准确,但对于普通模式没有优势。对于需要精准伺服输出或某些3D模式飞行有用,可自定义Switch Mode的传输方式为Full Res 8ch,Full Res 16ch Rate/2和Full Res 12ch Mixed。具体释意见下方 Switch Mode
Telem Ratio
遥测数据回传比例。高频头每发送个数据包到接收机,接收机回传个数据包,也就是 ,在设置中通常 。
此项数据保持默认
Std即可,除非有特殊用途需求,如:远航。比例有
Std,Off,1:128,1:64,1:32,1:16,1:8,1:4,1:2和RACE。Std为根据Packet Rate自动调整,一般默认此选项即可。Off为关闭回传,不推荐。
Switch Mode
控制通道如何发送到接收机,有多种模式。
正常在非全分辨率模式下有两个选项,为
Hybrid(混合)和Wide(宽频) 。
若Packet Rate设置为100/333Hz Full时,则可选Full Res 8ch,Full Res 16ch Rate/2和Full Res 12ch Mixed。下表总结了开关配置模式、可用通道开关位置和分辨率、通道更新速率以及适用于每个通道或飞控辅助通道的数据包速率。
开关位置 / 通道分辨率
ELRS的警告:将解锁开关设置在 AUX1(通道5) 上,并设置为约 1000 为锁定,约 2000 为解锁。
就算是固定翼,也建议把通道5设置成起落架。
通道更新速率与数据包速率
更多关于Switch Mode的相关信息见 Switch Configs
Antenna Mode
新版的脚本已移除此选项,若想使用Gemini接收机不再需要手动调整。
Link Mode
链路模式,改变高频头的核心协议和功能。
Normal (普通模式):默认配置,高频头仅负责发送来自遥控器的控制指令,并接收来自接收机的遥测数据并将其传回遥控器。
MAVLink:此选项启用了原生的 MAVLink 遥测下行和遥控指令上行。 它使高频头和遥控器成为地面站 (GCS) 与支持 MAVLink 协议的飞行器(如使用 ArduPilot 或 PX4 固件的机器)之间的中继桥梁。
玩航模一般不需要考虑MAVLink,MAVLink的适用场景通常在专业领域,如航点任务等。
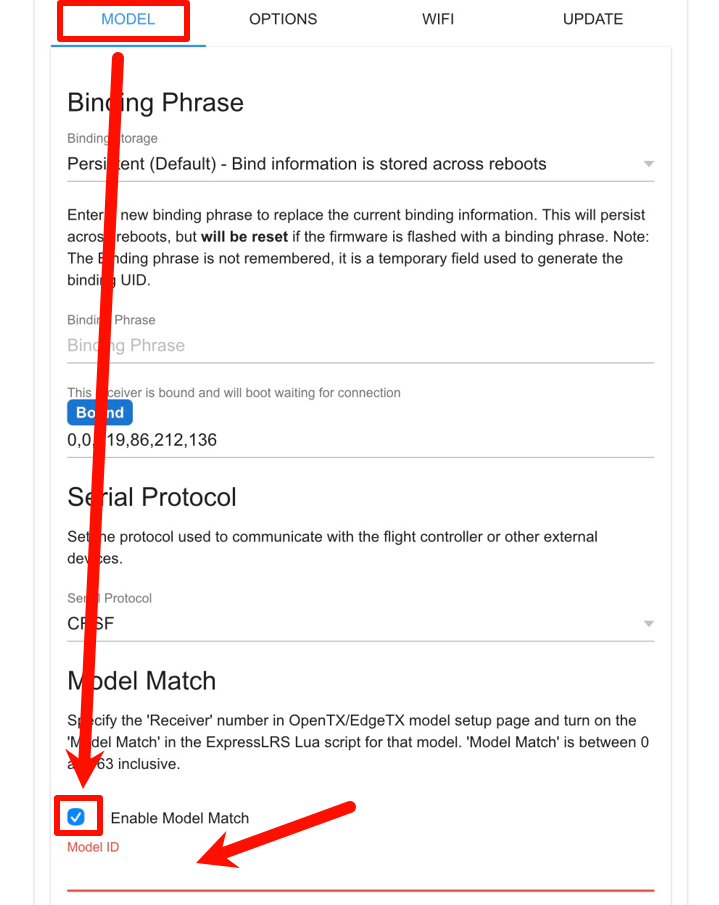
Model Match
模型匹配:ELRS 支持多个配置参数档。你可以通过在遥控器的 [模型设置 (Model Setup)] -> [内置/外置高频头 (Internal/External RF)] -> [接收机 (Receiver)] 编号处修改 “接收机 ID (Receiver ID)” 属性,来选择不同的配置档。
模型匹配旨在防止在遥控器上误选模型,避免使用非预期的遥控设置或 ELRS 配置进行飞行。
开启 (On): 当接收机连接时将此项设为“开启”,该接收机将仅与当前设置的“接收机 ID”进行连接。
关闭 (Off): 允许与任何已绑定的接收机(包括使用相同绑定短语的接收机)进行连接。接收机ID通过接收机打开WiFi,用设备连接接收机的WiFi,浏览器打开WebUI进行调整。
WiFi SSID一般为:ExpressLRS RX
密码为:expresslrs
后台地址为:10.0.0.1
若忘记了接收机的ID,遥控无法连接,可等待接收机上电60秒,会自动打开WiFi。
指示灯意义见:ELRS接收机简单排障
>TX Power
高频头功率,用于调整内置/外置发射高频头功率。
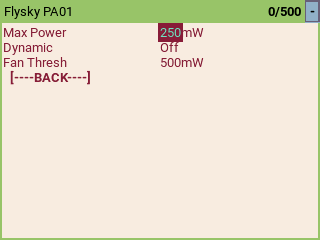
Max Power (最大功率):设置高频头的最大发射功率水平。如果你选择了一个硬件不支持的数值,系统会自动跳回最接近的支持功率。选项涵盖:10, 25, 50, 100, 250, 500, 1000 & 2000 mW。如果“动态功率”关闭,高频头将始终以此功率运行。
Dynamic (动态功率):开启或关闭动态功率功能。
Off: 始终以如上设置的“最大功率”发射。Dyn: 系统根据链路质量自动降功耗,在不需要大功率时节省电量并减少发热。AUX9 - AUX12: 允许通过特定的遥控器拨杆来切换“最大功率”和“动态功率”。拨杆高位 (>1500us) 为开启动态功率,低位 (<1500us) 为锁定最大功率。
Fan Thresh (风扇阈值):设置风扇启动的功率阈值。例如:设为 100mW,当你关闭动态功率并将最大功率设为 100mW 后,风扇会在短暂延迟后启动。当功率降至阈值以下后,风扇仍会持续运行一段时间。注意:并非所有高频头硬件都具备受此设置控制的风扇接口。 默认阈值为 250mW。
>VTX Administrator
VTX Administrator 允许直接通过遥控器更改模拟图传(VTX)设置,并将这些设置应用到你连接的任何接收机上。每当重新建立连接或按下 [Send VTX] 按钮时,图传设置就会被发送。
*此设置对数字图传无效!注意:每当高频头(TX)检测到与接收机(RX)建立连接时,VTX 管理员都会将当前的图传设置发送给飞控。这意味着在遥测丢失并恢复(telemetry lost/recovered)后,设置会重新发送。
如果你在飞行中通过其他方式(如 OSD 菜单)更改了图传功率,一旦发生信号闪断并重新连接,ELRS 的设置将覆盖掉你之前的临时修改。可能会造成图传频道切换,导致眼镜端丢失图传信号!!!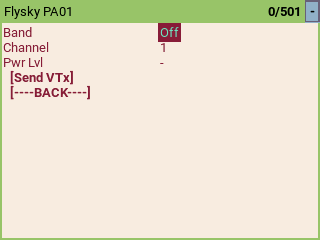
Band (频段):设置图传频段。选项包括:Off, A, B, E, F, R & L(标准的模拟模拟图传频段)。选择 Off 表示图传管理员不会干预任何设置。
Channel (频点):设置图传频点。选项为 1, 2, 3, 4, 5, 6, 7 & 8。
Pwr Lvl (功率档位):按索引设置功率。选项为 -, 1-8。这对应你飞控中
图传表设置的档位。例如:1 = 25mW, 2 = 100mW, 3 = 200mW 等。
图传表配置:穿越机科普——图传Pitmode (维修模式):选项为 On & Off。允许你快速进入或退出坑道模式(极低功率,防止干扰他人)。
*此选项在新版已被移除。[Send VTX]:按下此按钮将配置手动发送至接收机并传达给图传。每次连接建立时也会自动发送。
>WiFi Connectivity
WiFi 相关功能,包含所有与 WiFi 相关的操作功能。
相关教程见:ELRS高频头/背包升级固件
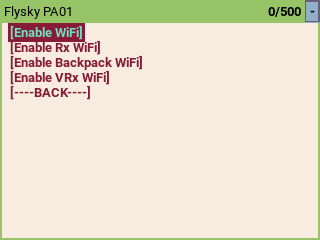
Enable WiFi (开启高频头 WiFi):激活发射模块(高频头)的 WiFi 模式,以便通过无线方式更新固件(需硬件支持)。可以通过连接高频头发出的热点,在浏览器中进行固件刷写或参数配置。
Enable RX WiFi (开启接收机 WiFi):将当前已绑定并连接的接收机切换至 WiFi 模式,以便进行无线固件更新(需接收机支持 WiFi 功能)。
Enable Backpack WiFi (开启高频头背包 WiFi):将发射模块背包 (TX Backpack) 切换至 WiFi 模式。仅适用于配备了背包模块,且已更新至最新 Backpack 固件的高频头。
Enable VRX WiFi (开启图传接收机背包 WiFi):将与高频头背包已绑定并连接的图传接收机背包切换至 WiFi 模式,以便进行无线固件更新。
>Backpack
此文件夹下的参数允许你更改与“背包(Backpack)”相关的各项配置。
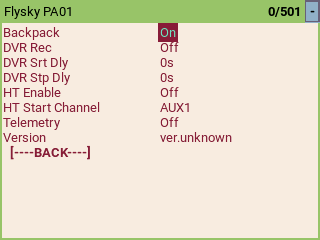
Backpack (背包功能):开启或关闭高频头内置背包功能。这是实现遥控器与 FPV 眼镜(需安装 VRX 背包)之间联动(如频道同步、自动录像)的总开关。
DVR Rec (DVR 录制):设置用于触发 FPV 眼镜录像的 AUX 通道 及其 拨杆位置。
*注意:此功能仅适用于安装了 VRX 背包固件并完成集成的 FPV 眼镜。DVR Srt Delay (录像启动延迟):设置在激活 AUX 开关后,DVR 延迟多久开始录制。这可以避开因操作开关导致的瞬时画面抖动。
DVR Stp Delay (录像停止延迟):设置在关闭 AUX 开关后,DVR 持续录制多久才停止。
HT Enable (头追开启):开启或关闭头追(Headtracking)功能。
*注意:仅在部分支持 VRX 背包集成的 FPV 眼镜上有效,用于将眼镜的姿态数据传回遥控器。
HT Start Channel (头追起始通道):设置用于发送头追位置数据的起始通道。
Telemetry (背包遥测):允许背包通过 ESPNOW 协议发送遥测数据包。这常用于在不占用主链路带宽的情况下,将数据传输给手机地面站或眼镜。
Version (版本):显示当前高频头背包(TX Backpack)中刷写的固件版本号。
*提示:如果此项显示为空,可能说明你的高频头背包固件尚未刷写或硬件通信异常。
BLE Joystick
蓝牙手柄模式,此选项一般只有ESP32的高频头会有。
点击 [BLE Joystick] 选项将激活“蓝牙低功耗摇杆”模式。
该功能允许遥控器通过蓝牙直接连接至电脑或移动设备,作为无线游戏杆使用,专门用于练习模拟器。
退出方式:若要退出该模式,请直接重启高频头(遥控器断电重开)或在遥控器上切换其他模型配置档。
*此模式不需要接收机!遥控器直接与电脑握手,摆脱数据线的束缚。
注意:开启此模式后,高频头将停止向真正的无人机发送控制信号,此时它仅作为一个蓝牙外设工作。请务必在实机飞行前确认已退出此模式。
如果你的电脑搜不到蓝牙设备,请检查高频头固件在刷写时是否开启了
蓝牙硬件功能支持。
Bind (对频)
点击 [Bind] 按钮将激活传统对频模式。
重点注意! 此命令仅对已经处于对频模式(表现为 LED 灯双闪)的接收机有效。
如果你的接收机(V3.3.2 及更早版本)在刷写固件时已经设置了“绑定短语(Binding Phrase)”,它将无法进入此对频模式,点击此按钮也不会有任何反应。
自动绑定:对于设置了相同“绑定短语”且固件版本兼容的设备,只需通电即可自动完成同步和绑定,完全不需要手动点击对频按钮。
*传统对频仅适用于:你没有设置绑定短语,或者想临时连接一台别人的飞机(且对方也没设短语)的情况。
*在新版 ELRS 中,强烈建议使用“绑定短语”而非点击此按钮,这能让你告别每次换接收机都要戳小按钮的痛苦。